智能电动调节阀阀位及速度控制(图1)采用双环控制方案,其中内环为速度环,外环为位置环。速度环主要将当前速度与速度给定发生器送来的设定速度相比较,通过速度调节器改变PWM波发生器载波频率,实现电机的转速调节。速度调节器采用模糊神经网络控制算法。位置环主要根据当前位置与设定位置的差值,通过速度给定发生器向内环提供速度的设定值。由于电动调节阀在运行过程中存在加速、匀速和减速等阶段,各阶段的时间长短、加速度的大小及何位置开始匀速或减速,均与给定位置、当前位置以及运行速度有关。速度给定发生器,通过比较实际阀位与给定阀位,当二者不相等时,以恒定加速度加速, 减速点根据当前速度、阀位值和阀位给定值的大小计算得来。
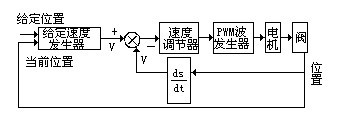
图1阀座及速度控制原理图
图2为电动调节阀的典型运行速度图,它由若干段变化速率不同的折线组成。将曲线上速率开始发生改变的那一点称为起始段点,相应的时间称为段起始时间t(i)(i=0,1,2,……),相应的速度称为段起始速度(i)(i=0,1,2,……)。
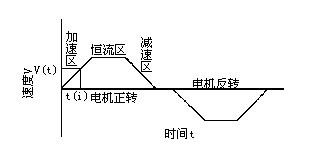
图2 执行机构的典型运行速度
设第i段速度的变化速率用k 表示,则有:

式中:Δv-- 两段点之间的速度变化值,m/s
Δv=vi+1-vi
Δt--两段之间的时间,S
Δt=ti+1-ti
显然,当ki=0时为恒速值,ki>0时为升速段,ki<0时为减速段。任意时刻的速度给定值为
vi=v(i-1)+ki×Ts
式中Ts--采样周期,Hz。
变化速率ki的取值应根据给定位置、当前位置以及运行速度的大小确定。
了解更多产品详情请登录http://www.zjcz-v.com
